

2020 Robot: Luna
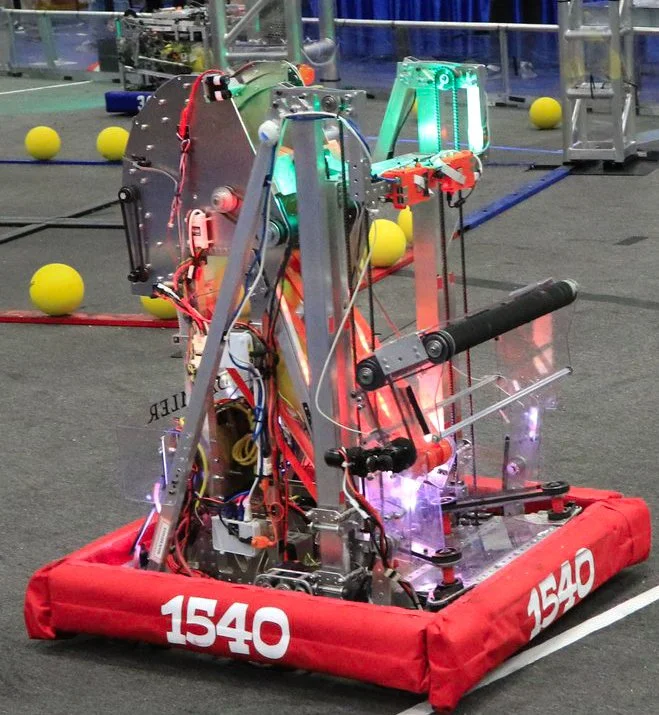
Our robot for 2020
-
Custom tank drive powered by 4 Falcon 500s
Top speed of 14.3 FPS
6” wheels to traverse bumps
Fully shielded underbelly to prevent stuck balls
-
2 Falcon 500s driving 6” aluminum flywheel with polyurethane tread
Maximum surface speed of over 100 mph (150 FPS)
Continuously adjustable UHMWPE hood to shoot from any position, including behind the control panel
Fires full volley in less than a second
-
Single-stage elevator climber with spring-loaded hook
Single Falcon motor can raise robot to full height in under a second
Can climb either solo or with a partner
Servo-actuated ratchet lock to prevent backdriving
-
Full width roller intake with V-hopper to index balls into a single line
Polybelt conveyor to stage balls before shooting
Stores 5 balls
-
Written in Java
RAMSETE non-linear feedback controller for auto path following
Automatic lineup and full vision target pose estimation using Limelight camera, LIDAR ranging, and NavX IMU
Field-oriented drive controls
Indexer management state machine for efficient ball storage
Linear interpolation algorithm to determine wheel speed and hood angle for any position
Wide-angle driver cameras with hardware-accelerated H.264 streaming
All our code is open-source at github.com/flamingchickens1540